题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
①更新权向量w(k+1);②令k=k=1,进行下一步递推,计算误差向量,直至e(k)小于等于0;③当k=0时,设定初始松弛变量b(0)的值,计算初始权向量;④更新松弛变量b(k+1);⑤计算误差向量e(k),H-K算法的正确排序是()
A.③⑤①④②
B.②⑤①③④
C.③①⑤④②
D.①②③④⑤
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
A.③⑤①④②
B.②⑤①③④
C.③①⑤④②
D.①②③④⑤
答案
 更多“①更新权向量w(k+1);②令k=k=1,进行下一步递推,计算误差向量,直至e(k)小于等于0;③当k=0时,设定初”相关的问题
更多“①更新权向量w(k+1);②令k=k=1,进行下一步递推,计算误差向量,直至e(k)小于等于0;③当k=0时,设定初”相关的问题
第1题
设A是nxn对称正定矩阵,并设v(i),i=0,1,...,n-1为线性无关的一组向量。令p(k),k=0,1,...,n-1,如下生成:

证明:方向p(k),k=0,1,...,n-1,是A共轭的。上述过程称为共轭化,它从一组线性无关方向出发,产生一组A共轭方向。
第4题
第5题
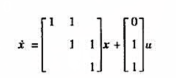
某被控制对象的动态方程
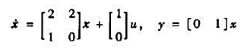
①设计状态反馈向量k,使得经状态反馈u=kx+r后,闭环系统在输入r=1(t)、x(0)=0时,响应的超调量为16.3%、过渡过程为7s(取5%误差带)。
②设x(0)=0,求经上述状态反馈后闭环系统在输入信号r=1(t)作用下的响应y(t)。
第6题
设向量组B:b1,b2,…,br能由向量组A:a1,a2,…ar线性表示为(b1,b2,…,br)=(a1,a2,…,ar)K,其中K为s×r矩阵,且A组线性无关。证明B组线性无关的充要条件是矩阵K的秩R(K)=r。
第9题
A.小于0.6 W/(m·K)
B.等于0.6 W/(m·K)
C.大于0.6 W/(m·K)
D.小于0.4 W/(m·K)
第10题
A.Q、W、E、R、T、Y、U、I
B.A、S、D、、F、G、H、J、K
C.A、S、D、F、J、K、L
D.E、R、T、Y、U、I、O、P
第11题
,x2,...,xn)是k次齐次函数.证明:设f(x,y,z)可微,函数f(x,y,z)是k次齐次函数 xf´x+yf´y+zf´z=kf(x,y,z).(必要性.对等式f(tX,ty,tz)=tkf(x,y,z)两端关于t求导数,然后令t=1充分性,将等式中的x,y,z分别换成tx,ty,tZ,有
xf´x+yf´y+zf´z=kf(x,y,z).(必要性.对等式f(tX,ty,tz)=tkf(x,y,z)两端关于t求导数,然后令t=1充分性,将等式中的x,y,z分别换成tx,ty,tZ,有
txf'x(tx,ty,tz)+yf´y(tx,ly,tz)+zf´z(tx,ty,tz)=kf(tx,ty,tz)
改写为

两端关于t求积分,再确定常数C.)