题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
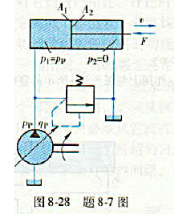
在图8-28所示的容积调速回路中,如变量泵的转速np=1000r/min,排量Vp=40ml/t,泵的容积
效率ηv=0.8,机械效率ηm=0.8。泵的工作压力pp=6MPa,液压缸大腔面积A1=100x10-4m2,小腔面积A2=50x10-4m2。液压缸的容积效率η'v=0.98,机械效率ηm'=0.8,管道损失忽略不计,试求:
1)回路速度刚性。
2)回路效率。
3)系统效率。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
1)回路速度刚性。
2)回路效率。
3)系统效率。
答案
 更多“在图8-28所示的容积调速回路中,如变量泵的转速np=1000r/min,排量Vp=40ml/t,泵的容积”相关的问题
更多“在图8-28所示的容积调速回路中,如变量泵的转速np=1000r/min,排量Vp=40ml/t,泵的容积”相关的问题
第1题
在图P5.7(b)所示电路中,若要求C1与C2所在回路的时间常数相等,且已知rbe=1kΩ,则C1:C2=?若C1与C2所在回路的时间常数均为25ms,则C1、C2各为多少?下限频率fL=?
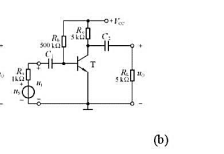
P5.7
第2题
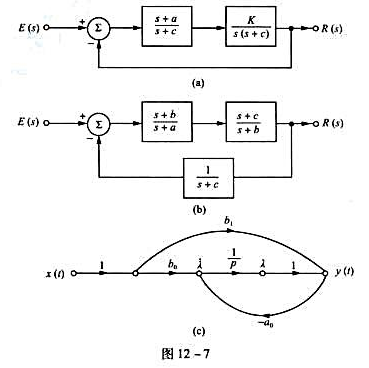
统的状态方程和输出方程.在图12-7(c)中传输算子为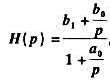 考虑图中结点λ之后增益为1的通路在本题中能否省去?
考虑图中结点λ之后增益为1的通路在本题中能否省去?
第3题
第4题
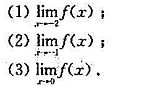
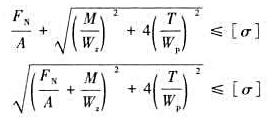
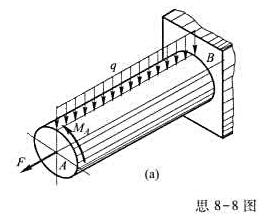
一圆截面悬臂梁如思8-8图a所示,同时受到轴向力、横向力和扭转力偶作用。
(1)试指出危险截面和危险点的位置;
(2)画出危险点的应力状态;
(3)下面两个强度条件中哪一个正确?
第6题
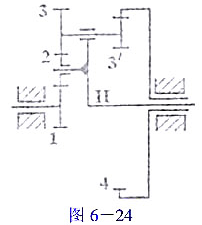
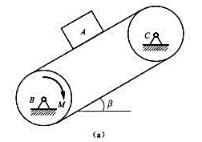
题12-13图(a)所示一皮带运输机构,设皮带质量可忽略,皮带与水平面的倾角为β,被提升的重物A质量为m1,轮B和轮C的半径均为r,质量均为m2。如机构在启动时主动轮B受转动力偶M作用,试求重物A随皮带倾斜上升的加速度。轮B和轮C均可视为均质圆盘。
第7题
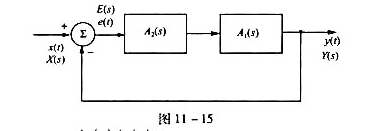
定,并使误差信号e(t)=x(t)-y(t)随时间增长而衰减到零.
(1)若 a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值
a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值 .(借助拉氏变换的终值定理.)
.(借助拉氏变换的终值定理.)
(2)若A1(s)仍如(1)问,而A2(s)改为比例积分(PI)控制 .为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
.为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
(3)若 试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时
试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时 可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
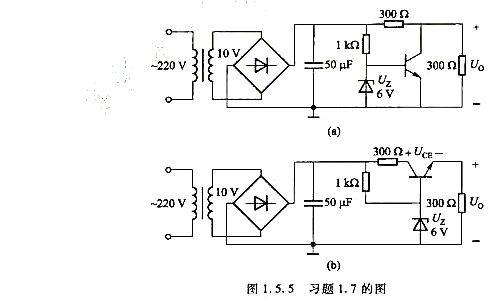
第10题
在图1.5.5(a)、(b)所示的两种简单稳压电路中,当电网电压增加时,说明稳压过程?两种电路在结构和原理上有什么不同?
第11题
载RL开路时,试求 (2)若RL=2kΩ,试求相应的Av值.
(2)若RL=2kΩ,试求相应的Av值.